 Jellyfish flow
Jellyfish flow
|
|
|
|
|
In order to swim, jellyfish contract the circular muscles that line the undersurface of their bell (also called the subumbrellar surface). This contracts their mesoglea bell. The motion of the bell from the relaxed position to the fully contracted position results in the mesoglea interacting with the surrounding water in such a way that causes the jellyfish to move forward.
The shape of the bell, the size of the velum (relative to the bell diameter) and contraction characteristics determine how medusae interact with the surrounding fluid. In other words, these traits of a medusa interact to determine the flow that a medusa generates when swimming and how they generate thrust for swimming. Consequently, prolate and oblate medusae propel through the water differently.
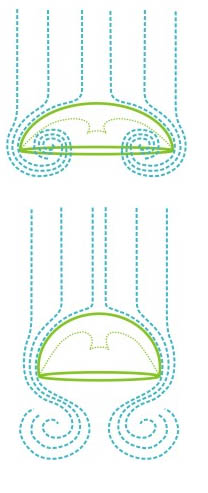
Bullet shaped medusae (i.e., prolate medusae) generally possess large velums relative to their diameter and contract their bells rapidly. Their shape in conjunction with their contraction kinematics results in a rapid ejection of fluid from inside their bell while entraining minimal fluid from outside the bell into their wake. Consequently, they generate swimming thrust via jet propulsion.
Flatter medusae (i.e., oblate medusae) do not generally possess large velums and they contract their bells slower than prolate medusae. Consequently, they throw large amounts of water behind them as they swim that comes from both inside and outside the bell and forms a series of large closely spaced vortex rings in their wake. In addition, as their bells expand, after each contraction, water rushes in and refills the bell in the form of a large vortex ring the rotates in the opposite direction of the ring created when the bell contracted. This motion generates swimming thrust via rowing propulsion (also termed jet-paddling).
 |
 |
 |
 |
